As tartarugas que abriram as portas para a robótica
Conheça o caminho trilhado pelos robôs móveis ao longo da história e como eles se tornaram as ferramentas indispensáveis dos dias de hoje
- Data: 12/07/2017 16:07
- Alterado: 15/08/2023 19:08
- Autor: Redação ABCdoABC
- Fonte: Henrique Fontes/InSAC
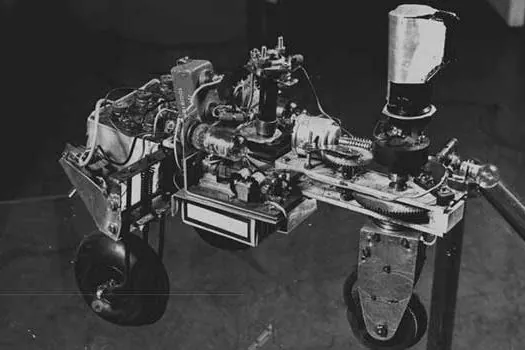
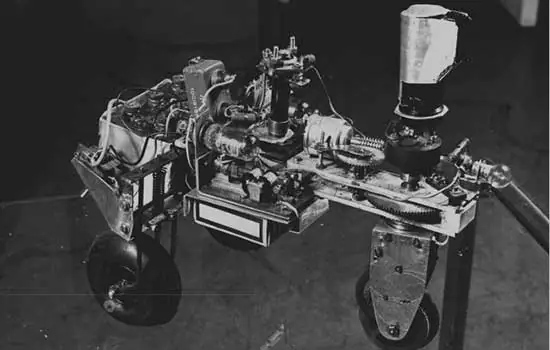
Estrutura das tortoises por baixo do casco oval
Crédito:Owen Holland
Elmer e Elsie eram irmãos próximos que tinham um hobby em comum: adoravam brincar de seguir a luz e desviar de obstáculos dentro da casa onde moravam, situada em Bristol, na Inglaterra. De tamanho pequeno, eles se aventuravam andando sobre rodas, impulsionados por simples motores e cobertos por um casco oval de plástico que lembrava a estrutura de uma tartaruga, tanto que foram carinhosamente apelidados com o nome do réptil por seu criador. Mas o que o “pai” dessa invenção não imaginava era que nascia ali, em sua própria residência, a inspiração para um universo enorme de possibilidades na ciência. Os irmãos, na verdade, eram os primeiros robôs inteligentes da história.
Criados no final da década de 40 pelo renomado neurofisiologista Willian Gray Walter, os robôs foram a prova de uma convicção que vinha sendo amadurecida pelo cientista em seus estudos. Ele acreditava que organismos com sistemas nervosos simples também poderiam mostrar comportamentos complexos e resolveu aplicar a teoria na construção de seus “filhos robóticos”, chamados de tortoises (tartarugas, em português). Eles possuíam apenas dois sensores, um de luz e outro de contato, que poderiam ser comparados a dois órgãos de sentido humano. Uma bateria alimentava os dois “irmãos” que desempenhavam somente duas funções: desviar de obstáculos quando se chocassem com algum e procurar uma fonte de luz.
Apesar da simplicidade dessas tarefas, elas marcaram o início do que chamamos de robótica móvel, pois, por mais limitada que fosse, esses robôs possuíam algum tipo de inteligência artificial que permitia a tomada de decisões durante um trajeto. Os anos seguintes ao feito foram de novos testes, com a construção de robôs semelhantes, mas ainda sem a possibilidade de se vislumbrar grandes aplicações. “Ainda não existia nenhuma utilidade prática, eram realizadas apenas provas de conceito”, explica Guilherme Pereira, pesquisador do Instituto Nacional de Ciência e Tecnologia para Sistemas Autônomos Cooperativos (InSAC).
Ao contrário da evolução dos estudos na área móvel a robótica industrial ganhava força e, por se tratar de um cenário com aplicações mais evidentes, ela se desenvolvia de maneira mais rápida, tendo em vista os grandes investimentos de empresas no setor. Além disso, as limitações tecnológicas da época, como a falta de computadores com boa capacidade de processamento, emperravam o crescimento científico dos robôs inteligentes: “A robótica móvel é muito mais complexa do que a encontrada nas indústrias. Nós temos o grande desafio que é o de permitir que os robôs se localizem durante uma tarefa, pois, a princípio, eles não sabem onde estão. Dessa forma, precisamos desenvolver técnicas avançadas que utilizam sensores sofisticados e de alto custo”, diz Guilherme que também é professor da Universidade Federal de Minas Gerais (UFMG).
Aliadas da robótica – Na década de 70, as universidades tornaram-se importantes aliadas dos robôs móveis e começaram a desenvolver trabalhos mais aprofundados. As perguntas básicas que os pesquisadores procuravam responder na época eram: como planejo o movimento de um robô para que ele desvie de obstáculos? Como é que eu faço para ele se localizar? Como faço para ele sair de um ponto e chegar a outro?
Os cientistas da Universidade de Stanford, nos Estados Unidos, foram os responsáveis por um dos primeiros resultados relevantes dessas pesquisas. Eles criaram robôs que continham câmeras e identificavam obstáculos por meio de técnicas de visão computacional. As máquinas também conseguiam desempenhar algumas simples tarefas de forma autônoma, como, por exemplo, seguir uma linha no chão. Apesar do avanço, o estopim da evolução dos robôs móveis ainda estava por vir.
Chega a década de 80 que, para Guilherme, foi um divisor de águas nos estudos da área pelo fato dos primeiros carros autônomos começarem a surgir. “Até então, tudo era feito em laboratório e foi quando começaram a realizar testes na rua”, explica o especialista. O primeiro veículo a realizar atividades sem motorista foi o NavLab 1, uma van autônoma desenvolvida pela Universidade Carnegie Mellon, EUA, em 1986. Com pouca sofisticação, ela não possuía tantos sensores e circulava em baixa velocidade. Após anos de pesquisas e aprimoramentos, especificamente em 1995, o NavLab 5 conseguiu atravessar os Estados Unidos de costa a costa, com boa parte do percurso realizado de forma autônoma.
Com o passar dos anos foi ficando mais viável investir na robótica móvel. Computadores mais potentes, a miniaturização da eletrônica, a evolução das baterias, o desenvolvimento de ferramentas portáteis e um menor custo de produção dessas tecnologias criaram um novo cenário, abrindo um leque de aplicações. “Uma vez proporcionada a capacidade de mobilidade e percepção às máquinas, você consegue pensar na solução de inúmeros problemas, especialmente aqueles que envolvam riscos e esforços físicos aos seres humanos”, explica Dênis Wolf, membro do InSAC e professor do Instituto de Ciências Matemáticas e de Computação (ICMC) da USP.
Há sete anos o docente pesquisa sobre veículos autônomos. Ele participou de importantes projetos, como o CaRINA e fez parte da equipe que desenvolveu o primeiro caminhão autônomo da América Latina. Atualmente ele trabalha no desenvolvimento de pesquisas na área dentro do InSAC e a ideia para o futuro é proporcionar não apenas um carro autônomo, mas uma série deles atuando em conjunto, possibilitando, assim, mais segurança e melhor qualidade de vida aos cidadãos. “O transporte revolucionou a humanidade e acredito que teremos uma nova revolução quando as máquinas puderem realizar tarefas de locomoção para as pessoas”, afirma Dênis.
Segundo o pesquisador, os benefícios da robótica para a sociedade fazem parte de um processo contínuo: “Até pouco tempo atrás nós tínhamos robôs que aspiravam o pó do chão, cortavam a grama e essas já eram boas demonstrações do uso prático da tecnologia. Hoje, nós podemos fazer extração de minérios de forma totalmente automatizada, encontramos aviões com pilotos automáticos e nem sempre as pessoas têm a dimensão de que nessas tarefas também são utilizados elementos robóticos”.
Os robôs alcançam o céu – O universo de aplicações dos robôs não parava de se expandir, tanto que as máquinas resolveram, literalmente, alçar voos maiores e os drones entraram em cena na década atual. Entre as funções mais conhecidas dos veículos aéreos, está seu uso na agricultura para permeabilizar plantações e mapear grandes áreas rurais, identificando, por exemplo, vegetações afetadas por pragas ou até mesmo focos de incêndio.
Um grande desafio das pesquisas é possibilitar que os drones atuem em baixas altitudes. Guilherme está desenvolvendo trabalhos na área e explica que a maior preocupação é com os obstáculos encontrados nessas regiões, como montanhas, prédios e casas. Além disso, os chamados “cânions terrestres” fazem com que, muitas vezes, os drones percam o sinal de GPS, prejudicando sua localização e a realização de uma tarefa.
“Como eu planejo o movimento desses robôs considerando as incertezas que eles podem encontrar pela frente?”. Essa é a principal questão que o pesquisador está tentando resolver durante suas duas pesquisas em andamento no InSAC. Segundo Guilherme, seus trabalhos poderão servir de alicerce para a utilização dos drones em diversos tipos de serviços, como o de entregas rápidas de cartas e remédios, por exemplo.
Fazer a diferença e poder contribuir diretamente na rotina das pessoas é o que faz Dênis continuar trabalhando com a robótica. “Isso é o que mais me encanta! É muito desafiador quando você coloca uma máquina para trabalhar no mundo real, além de ser bem mais fácil motivar um grupo de pesquisadores numa área com perspectivas de benefícios sociais”, afirma o professor.
Apesar da enormidade de contribuições que a robótica móvel já nos trouxe nas últimas décadas, Guilherme acredita que todos esses resultados ainda são apenas a ponta do iceberg. “É uma área com futuro muito promissor. O que estamos vendo acontecer é apenas o começo e as aplicações irão muito além do que encontramos hoje”, finaliza.

Crédito:Owen Holland

Crédito:Owen Holland

Crédito:Owen Holland
Crédito:Owen Holland Estrutura das tortoises por baixo do casco oval